3. kolo CM lige odražno je od 27.2.-12.3. Sudjelovali su učenici mlađe i starije dobne skupine gdje su osim programiranja mBot robota trebali koristiti i micro:bitove.
Čestitke svim učenicima koji su sudjelovali u 3. kolu CM lige!
ZADATAK – MLAĐA DOBNA SKUPINA
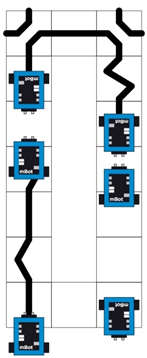
U ovom kolu zadatak je grupno osmisliti programe i suradnju 3 robota na rješenju postavljenog zadatka.
Prvi robot mora krenuti sa startne linije tek onda kada pritisneš tipkalo (Button) na njemu, a zatim mora pratiti liniju na zadanoj stazi, te kad linija nestane, stati. Kraj linije robot treba detektirati senzorom za praćenje crte.
Nakon što stane, treba poslati poruku “Kreni” slijedećem robotu koji ga čeka na označenoj poziciji okrenut prema njemu.
Drugi robot po primitku navedene poruke treba napraviti okret od 180 stupnjeva i krenuti prema trećem robotu prateći stazu senzorima za praćenje crte, te stati kada se nađe 15 cm od njega. Udaljenost do trećeg robota drugi robot treba detektirati korištenjem ultrazvučnog senzora. Kada se zaustavi, drugi robot treba poslati poruku “STEM”.
Treći robot treba čekati okrenut prema drugom robotu, te po primitku poruke napraviti okret od 180 stupnjeva i nakon toga odvoziti cca 50 cm tako da stane prednjim kotačićem unutar zadnjeg kvadratnog polja, najviše do pozicije označene na priloženoj skici.
ZADATAK – STARIJA DOBNA SKUPINA
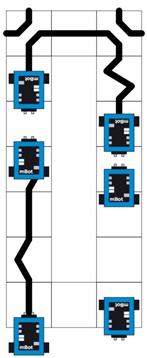
U ovom kolu zadatak je grupno osmisliti programe i suradnju 3 robota na rješenju postavljenog zadatka.
Prvi robot mora krenuti sa startne linije tek onda kada pritisneš tipkalo (Button) na njemu, a zatim mora pratiti liniju na zadanoj stazi, te kad linija nestane, stati. Prije nego pritisneš tipkalo za pokretanje robota neka RGB diode na robotu svijetle crvenom bojom, a za vrijeme vožnje zelenom. Kraj linije robot treba detektirati senzorom za praćenje crte. Nakon što stane, treba poslati poruku “Kreni” slijedećem robotu koji ga čeka na označenoj poziciji okrenut prema njemu.
Drugi robot po primitku navedene poruke treba napraviti okret od 180 stupnjeva i krenuti prema trećem robotu prateći stazu senzorima za praćenje crte, te stati kada se nađe 15 cm od njega. Udaljenost do trećeg robota drugi robot treba detektirati korištenjem ultrazvučnog senzora. Kada se zaustavi, drugi robot treba poslati poruku “STEM”.
Treći robot treba čekati okrenut prema drugom robotu, te po primitku poruke napraviti okret od 180 stupnjeva i nakon toga odvoziti cca 50 cm tako da stane prednjim kotačićem unutar zadnjeg kvadratnog polja, najviše do pozicije označene na priloženoj skici desno. Kad stane, treći robot treba Morseovim znacima svojim LED lampicama crvenom bojom odaslati signal STEM.
Preuzeto s croatianmakers.hr
Fotografije pogledajte OVDJE.